Sistem robot secara umum dapat dilihat pada gambar dibawah ini
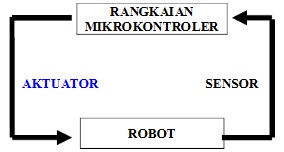
ada 3 bagian penting dalam sistem robot ini yaitu Sensor, Rangkaian Mikrokontroler (otak) dan Aktuator (Penggerak). Blok diagram rancangan robot secara keseluruhan dapat dilihat pada gambar dibawah ini.
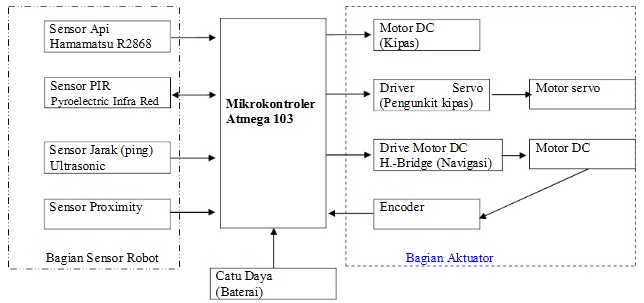
Blok diagram Bagian Rancangan Robot
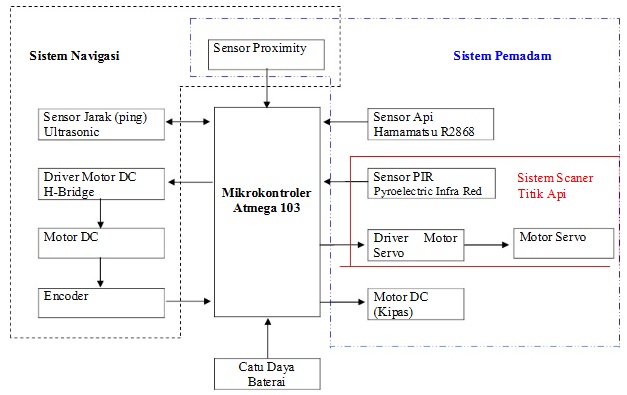
Blok Diagram Rancangan Sistem Kontrol Robot
1 MikrokontrolerSistem pengendali utama dari robot adalah mikrokontroler Atmega103. mikrokontroler ini dipakai untuk mengendalikan motor DC (H-brige), motor servo, sensor API (Hamamatsu R2868), Proximity sensor, PIR sensor, Ultrasonic sensor, Rotary Encoder dan kipas pemadam api. Mikrokontroler ini juga menghandle sistem Navigasi dan algoritma.
Dipilihnya mikrokontroler ini karena memiliki memori flash yang besar yaitu 128Kb, keunggulan lainnya memiliki kecepatan yang tinggi 6 MIPS pada kristal 6Mhz, konsumsi daya yang rendah. Untuk sistem pemprogrammannya secara SPI untukIn
system Programable yaitu pemprograman secara langsung, dapat diprogram
menggunakan bahasa C (CodeVision AVR). Memiliki I/O yang cukup (32 programable I/O port, 8 ouput line, 8 Analog input line) sehingga semua sistem robot dapat di handle
oleh mikrokontroler Atmega 103.
Dengan dipilihnya mikrokontroler ini robot dapat bermanuver, navigasi dengan kecapatan dan ketepatan yang maksimal dibandingkan dengan dua buah mikrokontroler sebab dapat bekerja secara realtime (distribute system) tanpa harus menunggu data dari mikrokontroler lainnya.
2 Rotary Encoder
Rotary encoder digunakan untuk mengubah atau mengkonversi posisi sudut ke dalam kode digital yang nanti akan dibaca oleh mikrokontroler. Rotary encoder berfungsi sebagai feedback yang akan memberitahukan besar sudut putaran dari motor dc. Dengan rotary encoder diharapkan motor dc pada robot dapat dikendalikan dengan baik.

Gambar Rotary Encoder
3 Motor DCMotor dc (2 Buah) digunakan sebagai penggerak utama robot dimana motor ini berfungsi untuk mengerakkan roda dari robot. Pada robot ini diperlukan arah putaran motor yang berubah-ubah. Berjalan maju atau mundurnya robot sesuai dengan keadaan lapangan diatur dengan membalikkan polaritas pada catu tegangannya. Untuk mencapai kecepatan dan torsi yang diinginkan maka digunakan motor dc12V.
Untuk mengatur kecepatan motor maka digunakan Pulse width modulation (PWM). disamping itu PWM berfungsi untuk mengurangi konsumsi daya yang berlebihan dari rangkaian. Cara kerja dari PWM yaitu dengan mengatur arus yang masuk atau dengan prinsip duty cycle yaitu rasio waktu ON terhadap waktu total (dinyatakan
dalam %).
Motor DC digunakan pula untuk memutar kipas yang akan mematikan lilin yang ada didalam ruangan. Penggunaan motor dc untuk memutar kipas dengan alasan mudah dalam pengendaliannya dengan hanya menggunakan sistem saklar ON OFF. Apabila api telah terditeksi dan terkunci posisinya maka saklar pada motor akan ON ketika api padam maka saklar OFF.
4. Driver Motor DC
Untuk dapat mengendalikan/ menggerakkan arah putaran motor sesuai dengan keinginan (maju, mundur dan berhenti) maka digunakan drive motor DC dengan Topologi H-Bridge dengan menggunakan IC L293D dari ST-Thomson yang memiliki arus output yang cukup besar untuk memacu putaran motor dc secara optimal.

Gambar Rangkaian Dirver Motor DC
Pada gambar diatas di hubungkan pada PWM dari mikrokontroler. Penggunaan inverterpada direction hal ini untuk memudahkan pengontrolan arah motor (maju atau mundur).
5 Motor Servo
Motor servo digunakan untuk menggerakkan gear pada ssytem pengungkit kipas pemadaman yang posisinya ada diatas robot. Sehingga pada saat robot akan mematikan lilin posisi kipas berdiri tegak. Alasan utama pemakaian motor servo kerena lebih mudah dalam pengontrolan
dalam menggerakkan pengungkit kipas.
6 Batterai
Sumber tegangan utama robot ini berasal dari batterai NI-cad 12V 600mAh. Namun mengingat motor dc memerlukan daya yang lumayan besar maka dipasang sebuah batterai NI-CAD 12V lagi untuk motor dc. Jadi jumlah baterai yang dipakai sebanyak 2 buah.

Gambar Rangkaian Catu Daya
Rangkaian catudaya ini menggunakan tiga buah IC regulator yaitu 7812, 7809 dan 7805. IC 7812 digunakan untuk menstabilkan tegangan input dari baterai. Ic ini mampu menangani daya sampai 1A hal ini sangat penting untuk mensuplai motor dc. Penggunaan kapasitor elektrolit diperlukan untuk memfilter tegangan dari distorsi pada rangkaian.
IC 7805 sebagai penstabil tegangan sebasar 5 V untuk mensuplai rangkaian
mikrokontroler. IC 7809 diperlukan untuk menghasilkan tegangan sebesar 9V
Tidak ada komentar:
Posting Komentar